

🧍♂️
剛性変化要因の分析
ヒトのランニング中で1つのパフォーマンス指標となる接地剛性や、上-下半身間のエネルギー伝達に重要な体幹回旋剛性の変化要因を分析。
- モーションキャプチャ
- スマートスーツによる走行介入
- 介入力の大きさとタイミングに着目
Focus Areas
ロボティクスやバイオメカニクスを基盤に、3つの観点から研究を進めています。
ヒトのランニング中で1つのパフォーマンス指標となる接地剛性や、上-下半身間のエネルギー伝達に重要な体幹回旋剛性の変化要因を分析。
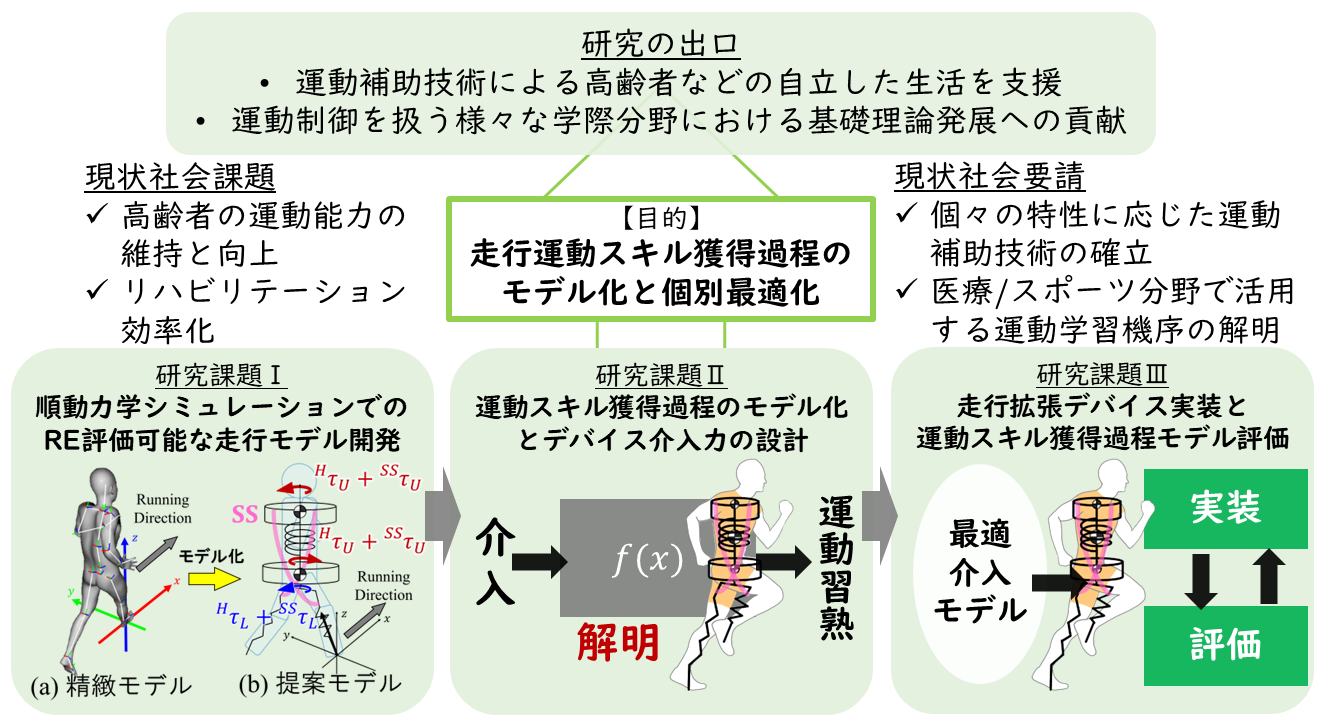
アシストデバイスのパラメータを個別最適化するため、中長距離でのヒトの運動に着目して、ヒト-デバイス間の相互作用を考慮したランニングモデルを開発。
100人規模での走行実験を可能にするシステムを開発中。一人ひとりの身体特性に合わせたアシストデバイスを目指します。

Methods & Tools
感覚をつかむ計測、やさしい言葉への翻訳、遊び心のあるプロトタイピングが持ち味です。
モーションキャプチャや床反力計を用いた身体のリズム計測。感覚的な言葉とデータを組み合わせて読み解きます。
人とデバイスの“ちょうどいい”タイミングを模索。パッシブな機構と数理モデルを組み合わせたアシストを設計します。
専門外の方とも共感できるよう、イラスト・映像・物語を添えてアシスト体験を形にします。
Research Journey
走行経済性変化機序の解明から、一人ひとりの身体特性に合わせたアシストデバイス開発へ研究を広げていきます。
接地剛性とはヒトがランニング中に接地の衝撃に対して、身体がどれだけゆがまないかの指標。多くの研究で走行パフォーマンス指標の一つとして分析されている。
ランニング中の上半身-下半身間の力学的エネルギ授受に着目。Smart Suitの介入力を変えた条件での、エネルギ伝達量や走行パフォーマンスを定量評価。
走行実験結果をもとに、ヒト-デバイス間の発揮力ピークタイミング差が走行経済性に与える影響を解析。力の大きさよりもタイミングが重要であることを発見。
現在は走行実験を100人規模で同時実施可能な実験システムの開発に取り組んでいる。一人ひとりの身体特性に合わせたアシストデバイスを開発する。